

Польотний контролер CUAV X7+ PRO
X7+ Pro® від CUAV® – передовий автопілот з процесором STM32H7 та комбінацією промислових датчиків. Відзначається підвищеною надійністю порівняно з попередніми моделями та сумісний з прошивкою ArduPilot. Прекрасно підходить для промислових дронів, вбудована система амортизації забезпечує краще поглинання ударів. Інтерфейси включають 14 PWM-виходів, 2 порти GPS та спеціалізований інтерфейс живлення UAVCAN. Вага автопілота – 101 г.

Польотний контролер для квадрокоптера Holybro Pixhawk 6X Mini Set
Pixhawk® 6X – високотехнологічний польотний контролер, підтримуючий стандарти Pixhawk® FMUv6X і Pixhawk® Autopilot Bus Standard, обладнаний мікроконтролером STM32H753 для надійного та гнучкого керування різними автономними транспортними засобами.
Він також вже має попередньо встановлений PX4 Autopilot®, що спрощує початок роботи для розробників, і він пропонує високий рівень продуктивності завдяки своєму потужному процесору та інтегрованому стандарту Pixhawk®, що робить його ідеальним для реалізації різноманітних проектів автономного керування.

Польотний контролер Holybro Pixhawk 6X RPi CM4 + PM03D
Плата Holybro Pixhawk RPi CM4 Baseboard – це інноваційний продукт, який поєднує в собі дві ключові технології для розробки безпілотних систем: платформу керування польотом Pixhawk FC та обчислювальний компаньйон Raspberry Pi Compute Module 4 (RPi CM4).

Польотний контролер CubePilot Pixhawk 2.1 Standard Set The Cube Orange+ (Receptor ADS-B)
CubePilot Pixhawk 2.1 Standard Set The Cube Orange+ (Receptor ADS-B) – це високопродуктивний контролер польотів для професійних безпілотників. Він має потужний процесор, вбудований приймач ADS-B для уникнення зіткнень з пілотованими літаками та підтримує кілька GNSS систем (GPS, GLONASS, Galileo). Модульний дизайн дозволяє легко інтегрувати додаткові пристрої, забезпечуючи стабільність і надійність в різних умовах експлуатації. Ідеально підходить для картографії, аерофотозйомки та моніторингу.

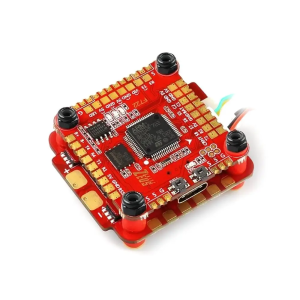
Польотний контролер Cuav x7 plus
Польотний контролер Cuav x7 plus вбудований на базі потужного процесора STM32H743 та обладнаний датчиками ICM-42688-P Acce&Gyro та промисловим компасом RM3100. Продукт відрізняється високою точністю завдяки використанню трьох акселерометрів і гіроскопів, а також системою температурної компенсації датчика. Інтерфейси включають 14 PWM-виходів, 2 порти GPS, 6 шин i2c та інше. Живлення від 4,5 до 5,4V. Вага пристрою становить 101 грам.

Польотний контролер CUAV Nora+
CUAV NORA+ – це високопродуктивний польотний контролер з процесором STM32H743, удосконаленими датчиками, включаючи сенсор ICM-42688-P. Пропонує інтегрований дизайн, амортизуючу систему та підтримку LTE Link для передачі даних на великі відстані. Має опцію додавання модуля RTK&PPK для високоточного позиціонування. Сумісний із прошивками ArduPilot 4.10/ PX4 1.12.3 та вище.

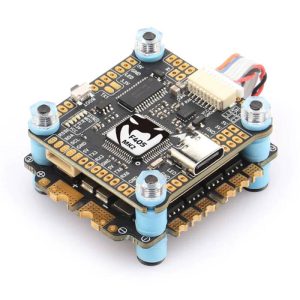
Польотний контролер Cuav V6X
Pixhawk V6X — це нове покоління Pixhawk, створене CUAV&PX4, засноване на модульній конструкції стандарту Pixhawk FMU V6X, надає максимальн безпеку та стабільность при використанні, користувачі також можуть налаштувати плату-носій відповідно до своїх потреб. ВикористовуватиH7 подвійної точності завдяки плаваючого -точковому арифметичному блоку і співпроцесору Cortex-M3, три резервних IMU з незалежною шиною та джерелом живлення, заводська технологія попереднього калібрування температури IMU, подвійна додаткова конструкція барометра та нове покоління запатентованої конструкції амортизації для забезпечення безпеки польоту та широких можливостей розширення кругового огляду БПЛА;
Інтегрований інтерфейс Ethernet 100M може обмінюватися даними з обладнанням для встановлення БПЛА, таким як робочі комп’ютери, є інерціальна навігація з оптоволоконна та картографічні камери, що відповідають потребам високоякісних БПЛА.

Польотний контролер Holybro Pixhawk 6C (Пластиковий корпус)
Pixhawk 6C — це останнє оновлення успішного сімейства польотних контролерів Pixhawk®, засноване на відкритому стандарті Pixhawk® FMUv6C і стандарті Pixhawk® Autopilot Bus. Він поставляється з попередньо встановленим PX4 Autopilot®. Всередині Pixhawk® 6C ви можете знайти STM32H743 на основі STMicroelectronics® у поєднанні з сенсорною технологією від Bosch® & InvenSense®, що дає вам гнучкість і надійність для керування будь-яким автономним транспортним засобом, придатним як для академічних, так і для комерційних застосувань.

Польотний контролер MATEK H743 WING V3
Польотний контролер Matek H743-WING V3 використовує найсучасніший і найпродуктивніший процесор H743, який працює з частотою 480MHz і оперативною пам’яттю 1Mb. На платі є новий порт CAN для підтримки майбутніх периферійних пристроїв UAVCAN.
Польотний контролер HGLRC Zeus F748 Stack – F722 FC + 48A 3-6S 4-in-1 BLHeli_S ESC
HGLRC Zeus F748 Stack – комбінація F722 FC та 48A 3-6S 4-in-1 BLHeli_S ESC
HGLRC Zeus F748 Stack – це високоякісний стек, який об’єднує контролер польоту F722 та 48A ESC. Цей комплект характеризується монтажною схемою 30.5×30.5 мм і оснащений контролером польоту F7, який містить гіроскоп MPU6000 та підтримує безпосереднє підключення літій-полімерних батарей типу 3-6S. Комплект включає в себе інтегрований барометр, 16-мегабайтний чорний ящик та універсальні конектори для DJI, LED та GPS.

Польотний контролер Matek H743-SLIM V3
Автопілот Matek H743-SLIM оснащений надшвидким сучасним процесором H7, що працює на частоті 480MHz та оперативною пам’яттю 1Mb. На платі має вбудований точний барометр Infineon DPS310, два гіроскопи, слот MicroSD для запису логів, 7 UART портів з можливістю підключення FPV DJI системи.
Також має порт CAN BUS, як і його більший аналог H743-WING, для підтримки підключення майбутніх спеціальних периферійних пристроїв.
H743-SLIM відрізняється від H743-WING більшою призначеністю для квадрокоптерів, так як відсутня плата PDB, ряд регуляторів напруги BEC та ін., хоча і може використовуватися для збирання багатьох радіомоделей, у тому числі крил. З прошивками ArduPilot, BetaFlight та підтримує iNAV. На контролері як другий гіроскоп використовується ICM42605.
Польотний контролер Diatone MAMBA F405 MK2 та регулятор ходу 50A
Diatone Mamba Basic F405 MK2 – це польотний стек для квадрокоптерів, який надає високу потужність і включає контролер політу та швидкісний регулятор ESC. Контролер політу оснащений процесором STM32F405RGT6 і датчиком MPU6000 для стабільного керування. Він підтримує OSD, має вбудований Blackbox і може працювати з багатьма функціями політного контролера BetaFlight. Швидкісний регулятор ESC Diatone Mamba F50 BLS здатний витримувати постійний струм 50А і має піковий струм 60А. Він підтримує протокол Dshot 300/600 і має захист TVS.
