









Польотний конролер CUAV Pixhawk V6X
Інформація:
Pixhawk V6X — це нове покоління Pixhawk, створене CUAV&PX4, засноване на модульній конструкції стандарту Pixhawk FMU V6X, надає максимальн безпеку та стабільность при використанні, користувачі також можуть налаштувати плату-носій відповідно до своїх потреб. Використовує H7 подвійної точності завдяки плаваючого -точковому арифметичному блоку і співпроцесору Cortex-M3, три резервних IMU з незалежною шиною та джерелом живлення, заводська технологія попереднього калібрування температури IMU, подвійна додаткова конструкція барометра та нове покоління запатентованої конструкції амортизації для забезпечення безпеки польоту та широких можливостей розширення кругового огляду БПЛА;
Інтегрований інтерфейс Ethernet 100M може обмінюватися даними з обладнанням для встановлення БПЛА, таким як робочі комп’ютери, є інерціальна навігація з оптоволоконна та картографічні камери, що відповідають потребам високоякісних БПЛА.
Особливості:
- H7 Процесор з плаваючою точкою подвійної точності
- Високопродуктивний співпроцесор ARM M3
- Низький рівень шуму IMU автомобільного рівня.
- Потрійний резервований IMU та подвійний резервований барометр.
- Автомобільний магнітний компас RM3100
- Новий вбудований дизайн амортизації
Специфікація:
Апаратне забезпечення
- Стандарт Pixhawk FMUv6x
- Стандарт DS-010 Pixhawk AutoPilot Bus
- СтандартDS-012 Pixhawk AutoPilot V6X
- Стандартний процесор STM32H753IIK6
- 32-bit Arm® Cortex®-M7 480MHz MCUs, 2MB Flash,1MB RAM
- Співпроцесор STM32F10X
- Акселерометр і гіроскоп
- ICM42688-P
- ICM-20649
- BMI088
- Компас RM3100
- Барометр 2×ICP-20100
Інтерфейси:
- ввід/вивід. 16
- потужність 4 2 для UAVCAN,2 для SMBUS
- GPS 2 1 порт GPS з I2C і захисним перемикачем (GPS1) 1 інтерфейс з I2C і GPS (GPS2)
- TELEM 3
- CAN 2
- PPM RC
- 1, виділений R/C вхід для PPM
- SBUS/DSM/RSSI 1, виділений R/C вхід для для Spektrum / DSM і S.Bus з аналоговим / PWM входом RSSI
- Виходи SBUS 1
- FMU Debug 1
- IO Debug 1
- Ethernet 1
- SPI Зовнішній 1 1 (інтерфейс SPI6, для розширення зовнішніх датчиків)
- ADIO 1 AD3.3/ADC6.6
- UART4 – 1
- USB 2 1 для Type C 1 for GH інтерфейс USB
- TF Slot 1
Фізичні характеристики:
- Робоча напруга 4.75~5.45V
- Вхідна напруга сервоприводу 0~9.9V
- Робоча температура -20~85
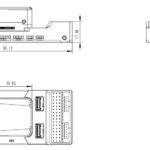
- Розмір 45×90×29,2 мм
- Вага 99 г Серцевина: 43 г Плінтус: 56 г









{kind=link}