

Регулятор живлення MAUCH PL 4-14S HYB-BEC 4x (2×5.3 V; 1х5 V; 1х12 V)
Короткий опис:
MAUCH PL 4-14S HYB-BEC 4x (2×5.3 V; 1х5 V; 1х12 V) – це надійний стабілізатор напруги, призначений для живлення різних електронних пристроїв та компонентів у безпілотних літальних апаратах, забезпечуючи стабільне та надійне живлення завдяки своєму гібридному дизайну та чотирьом вихідним каналам з різними напругами.
4 200 ₴ 5 250 ₴

Регулятор живлення MAUCH HS082 2-6S BEC DF-13-4P (5.35V 3А)
Короткий опис:
MAUCH HS082 2-6S BEC DF-13-4P (5.35V 3А) — це стабілізатор напруги для безпілотників, який забезпечує стабільне живлення компонентів, підтримує струм до 3А і має захист від переполюсування. Простий у встановленні та надійний у використанні.
735 ₴

Регулятор живлення MAUCH PL 2-6S BEC 2x (2×5.3 V) 3A
Короткий опис:
MAUCH PL 2-6S BEC 2x (2×5.3 V) 3A – це модуль з двома вбудованими вольтажними регуляторами, який призначений для живлення електроніки та інших компонентів у багатьох типах безпілотних літальних апаратів, таких як квадрокоптери, літачки, планери тощо. Основна функція цього модуля – забезпечити стабільне живлення для всіх підключених пристроїв у системі.
1 890 ₴
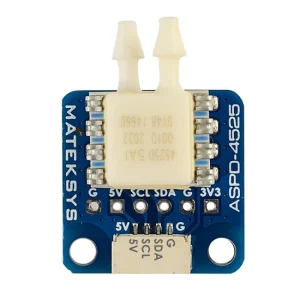
Датчик повітряної швидкості Matek Digital Airspeed Sensor ASPD 4525
Короткий опис:
Цифровий сенсор повітряної швидкості ASPD-4525 з інтерфейсом I2C забезпечує точні вимірювання для дронів та моделей літаків. Підтримує частоту оновлення до 70 Гц, має вбудовану температурну компенсацію та компактну плату. Сумісний з ArduPilot, PX4 та іншими сучасними автопілотами. В комплекті — приймач повітря, трубка та кабель. Ідеальний для побудови точних авіасистем управління.
2 467 ₴ 2 625 ₴


Регулятор живлення Matek BEC 6-60V – 5V9V12V
Короткий опис:
Matek Micro BEC – це компактний знижуючий регулятор напруги з широким діапазоном вхідної напруги від 6V до 60V. Він дозволяє вибирати вихідну напругу серед 5V, 9V або 12V (за замовчуванням 5V).
473 ₴
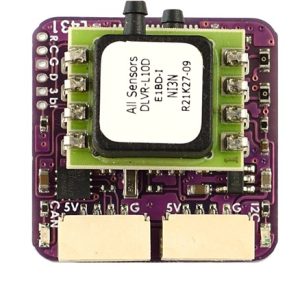
Датчик повітряної швидкості Matek ASPD-DLVR Digital AirSpeed sensor
Короткий опис:
Matek ASPD-DLVR – професійний датчик повітряної швидкості для дронів. Сумісний з ArduPilot, підтримує інтерфейси CAN та I2C. Висока точність і стійкість до температур роблять його незамінним для фіксованокрилих платформ, VTOL і QuadPlane. Комплектується кабелями та трубкою Піто.
5 250 ₴


Польотний контролер CUAV X7+ PRO
Короткий опис:
X7+ Pro® від CUAV® – передовий автопілот з процесором STM32H7 та комбінацією промислових датчиків. Відзначається підвищеною надійністю порівняно з попередніми моделями та сумісний з прошивкою ArduPilot. Прекрасно підходить для промислових дронів, вбудована система амортизації забезпечує краще поглинання ударів. Інтерфейси включають 14 PWM-виходів, 2 порти GPS та спеціалізований інтерфейс живлення UAVCAN. Вага автопілота – 101 г.
44 310 ₴

Польотний контролер CubePilot Pixhawk 2.1 Standard Set The Cube Orange+ (Receptor ADS-B)
Короткий опис:
CubePilot Pixhawk 2.1 Standard Set The Cube Orange+ (Receptor ADS-B) – це високопродуктивний контролер польотів для професійних безпілотників. Він має потужний процесор, вбудований приймач ADS-B для уникнення зіткнень з пілотованими літаками та підтримує кілька GNSS систем (GPS, GLONASS, Galileo). Модульний дизайн дозволяє легко інтегрувати додаткові пристрої, забезпечуючи стабільність і надійність в різних умовах експлуатації. Ідеально підходить для картографії, аерофотозйомки та моніторингу.
24 000 ₴

Польотний контролер MATEK H743 WING V3
Короткий опис:
Польотний контролер Matek H743-WING V3 використовує найсучасніший і найпродуктивніший процесор H743, який працює з частотою 480MHz і оперативною пам’яттю 1Mb. На платі є новий порт CAN для підтримки майбутніх периферійних пристроїв UAVCAN.
5 670 ₴ 6 247 ₴

Польотний контролер Pixhawk The Cube Red Pro Standard Set
Короткий опис:
Pixhawk The Cube Red Pro Standard Set — це високонадійний польотний контролер з подвійним STM32H7, розрахований на критичні UAV-застосування. Чотири IMU та три барометри забезпечують максимальну відмовостійкість. Ізольований статичний порт гарантує точні вимірювання висоти. Підтримка Ethernet та CAN FD робить систему готовою до сучасних UAV-архітектур. Повна сумісність з ArduPilot забезпечує гнучкість у будь-яких типах дронів.
61 000 ₴